hey, i'm Ryan Wang
mechatronics engineering @![]() UWaterloo
UWaterloo
full-stack robotics engineer — from ROS 2 to firmware to CAD to manufactured parts. I love taking systems from shower thought to fully fleshed autonomy.
AXIBO
mechanical engineering
Building humanoid robots at the forefront of Canadian robotics.
fusion360solidworkscc++python
WATonomous
software engineering
Developing perception and autonomous pathing software for Rover on Waterloo's AV design team.
c++pythonROS 2docker
Churchill Robotics
mechanical lead, mentor
Directed a robotics club of 10+ teams totalling 150+ members, built world-class competition robots.
c++onshapefusion360PIDpure pursuit
leave me a message_

ABOUT ME
- Proud
 Canadian citizen.↳ Currently in Waterloo, grew up in Calgary.
Canadian citizen.↳ Currently in Waterloo, grew up in Calgary. - Favorite game:
 Minecraft; currently playing
Minecraft; currently playing Balatro.
Balatro. - I have more hours on
 SolidWorks than in class.
SolidWorks than in class. - Skilled in 🎹 piano, 🎻 violin, 🪈 flute, and 🎷 alto sax.
- My favourite model is
 Claude Sonnet 4.5.
Claude Sonnet 4.5. - My current goal is to contribute to
 Neuralink.
Neuralink.
PROJECTS
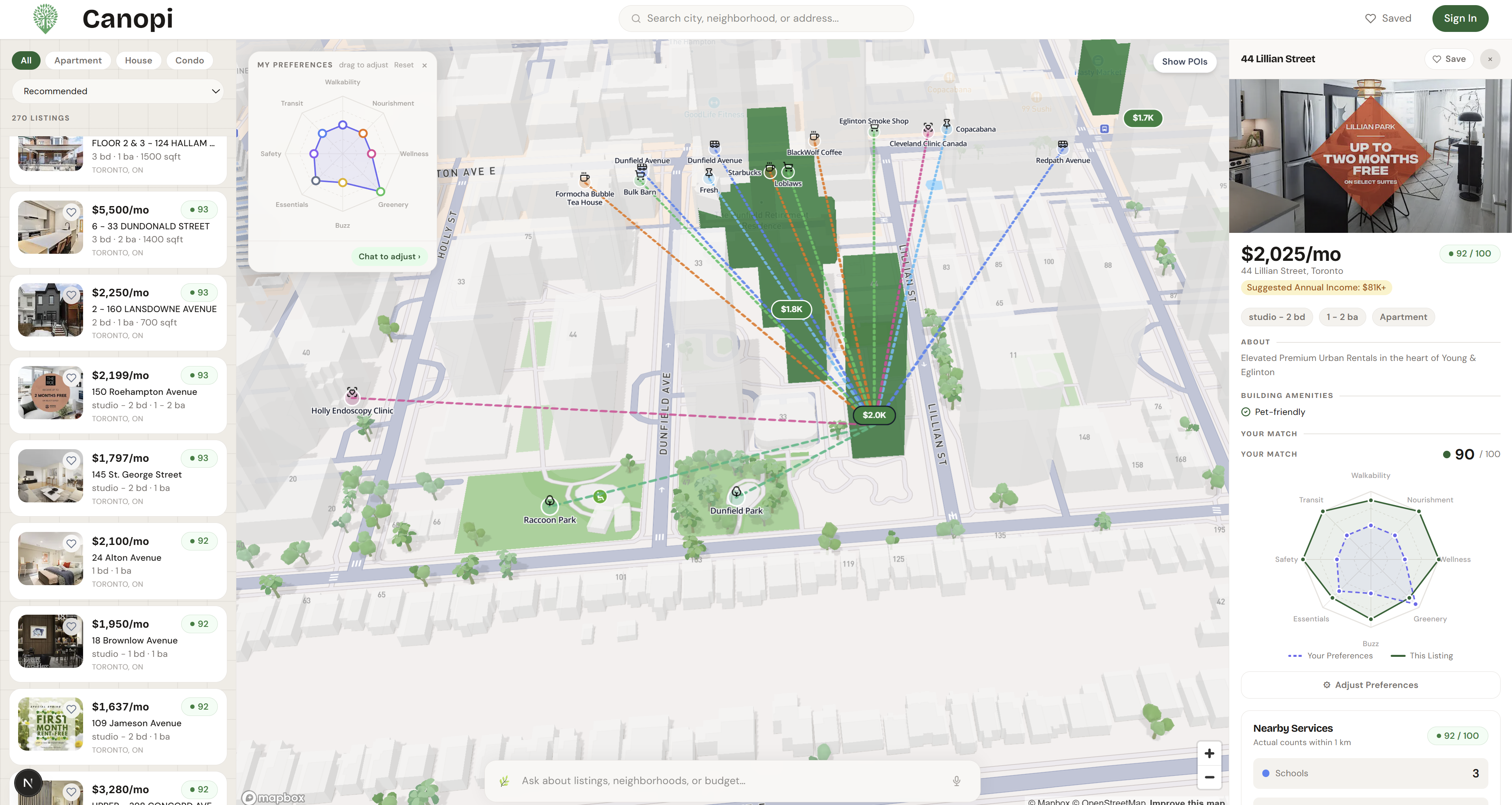
Canopi
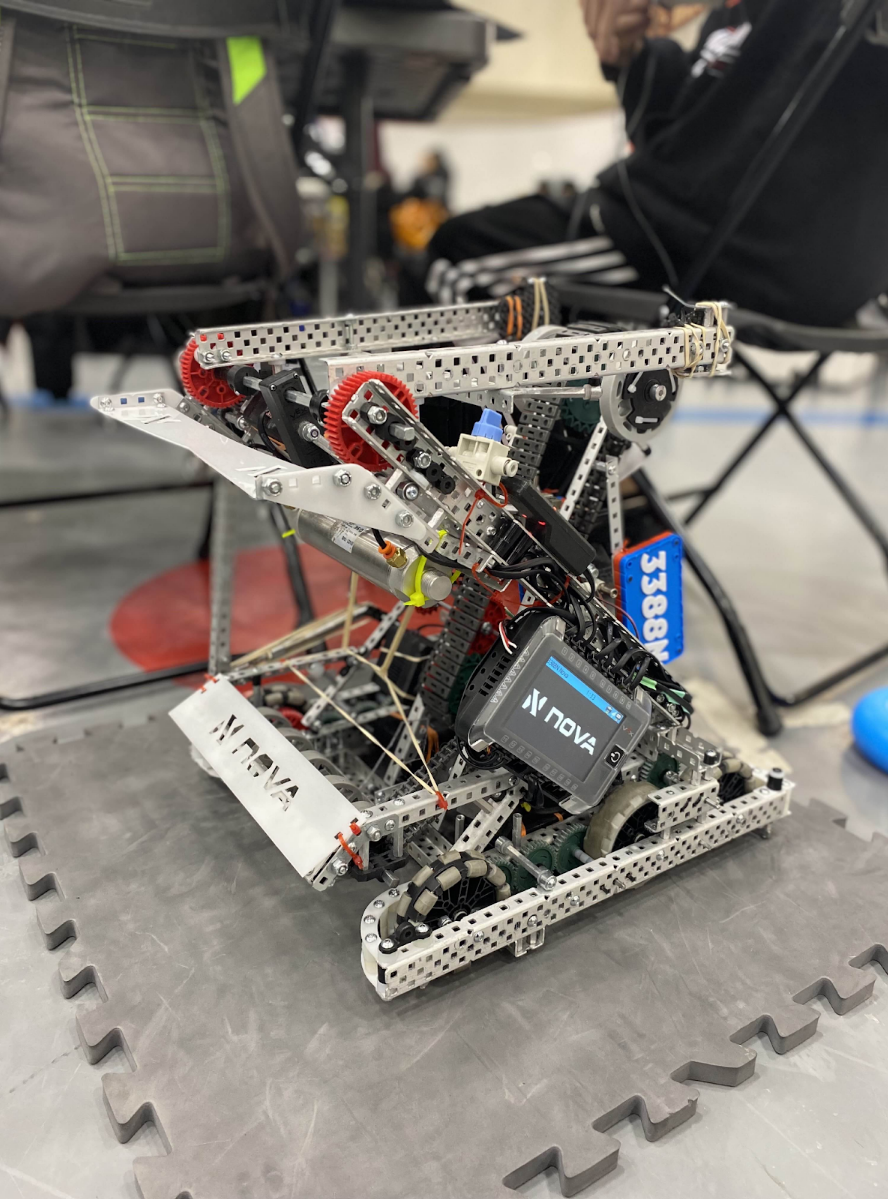
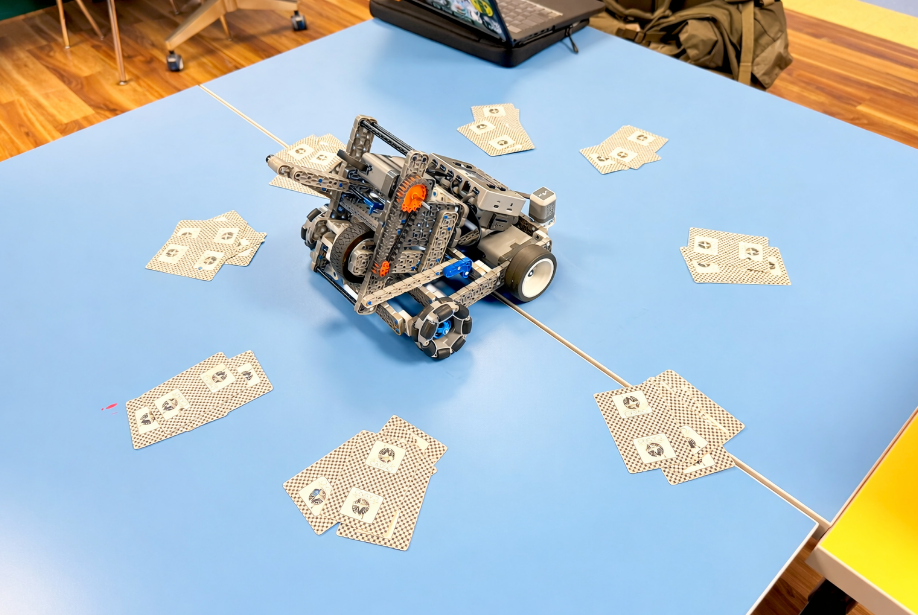
VEX Robotics
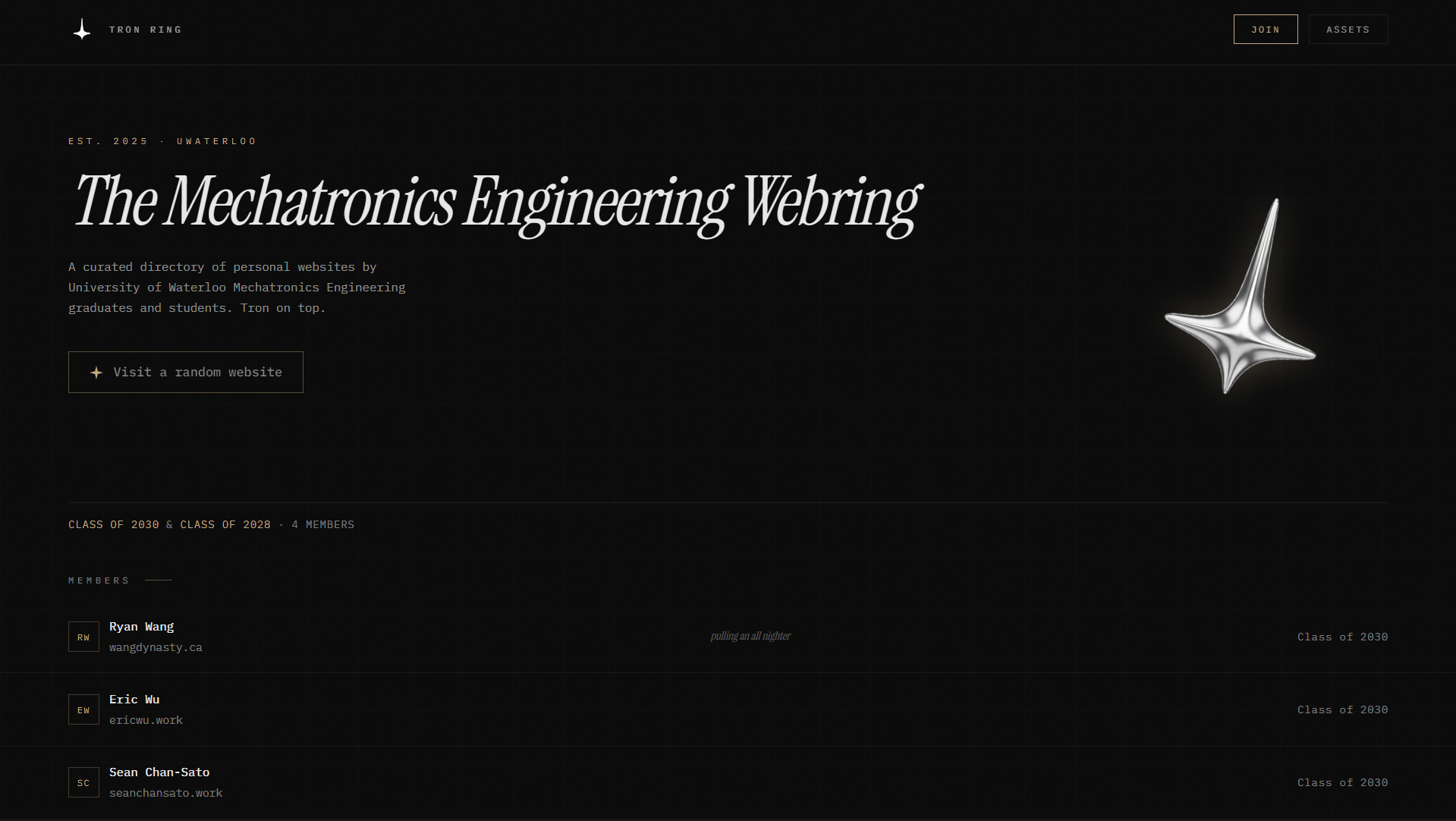
Mechatronics Webring
Valorant Fantasy
'fantasy football' style app for VCT

Molehunt

Smart Home Sensor System
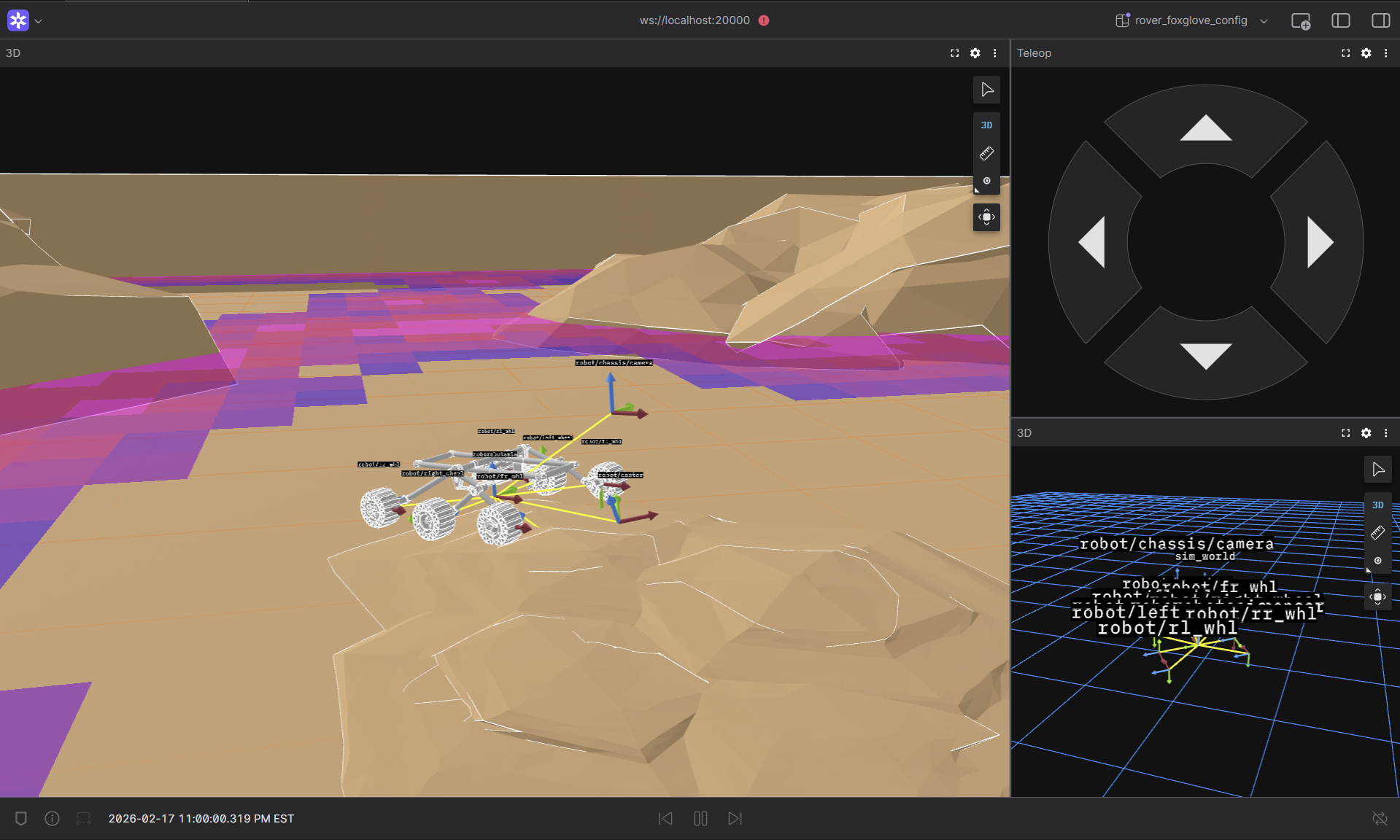
Autonomous Mars Rover

Anthropomorphic Robot Hand
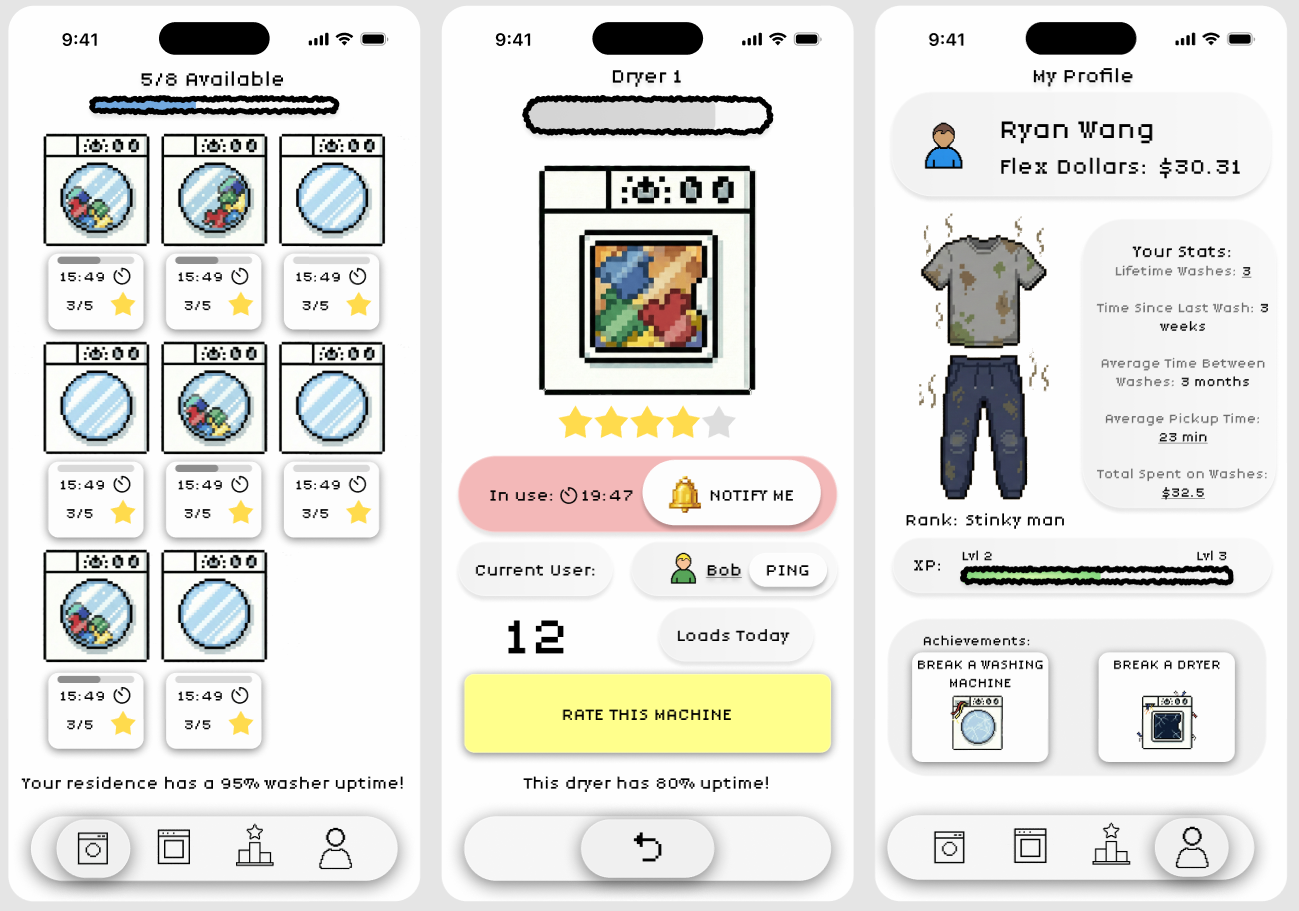
WaterlooWash
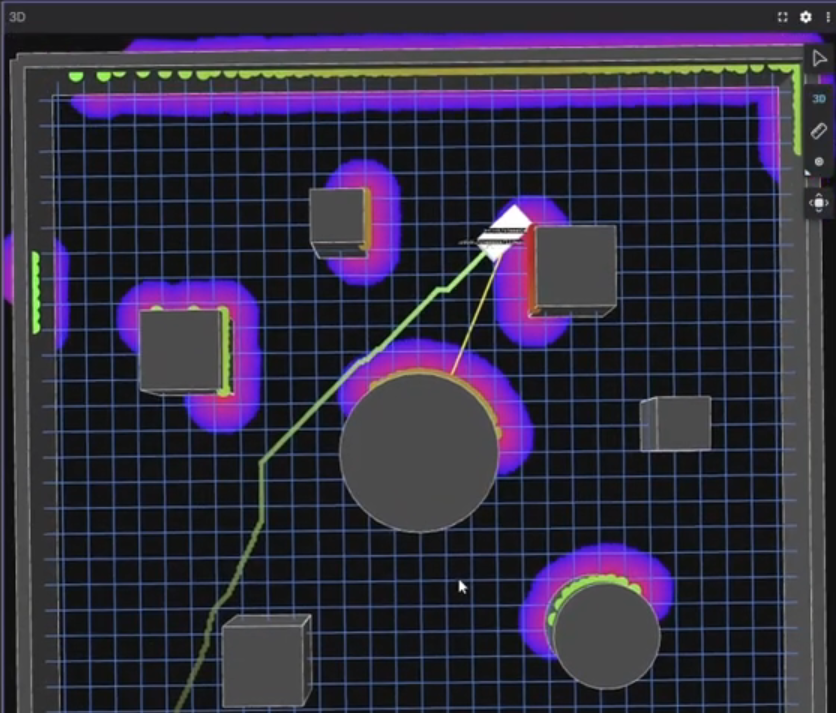
Self-Driving Car Sim
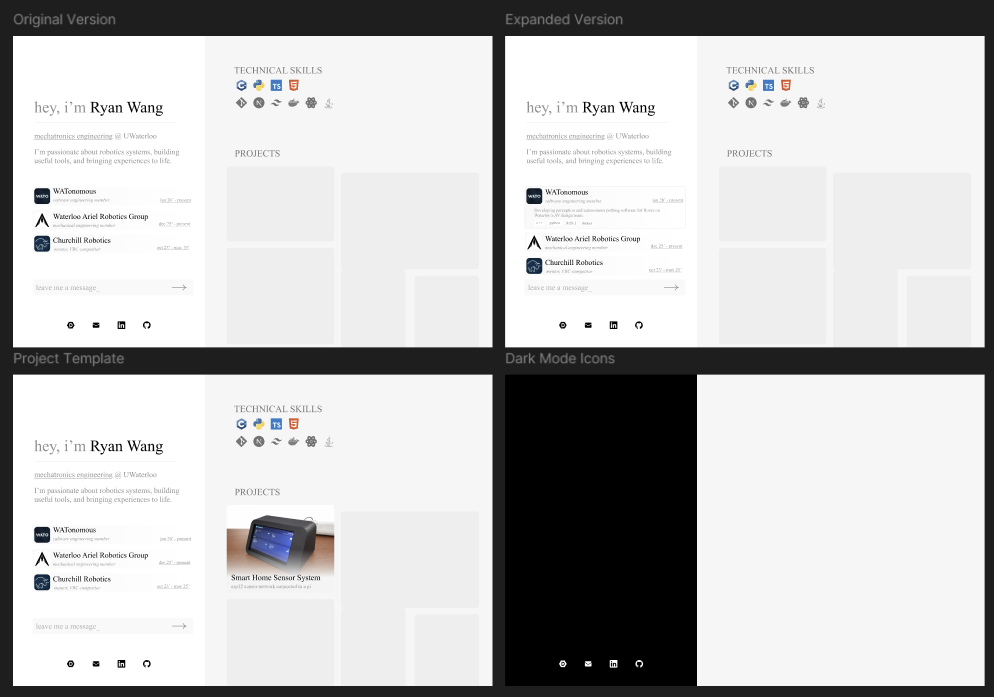
Personal Portfolio